文:mbot
有用户使用mbot机器过程中,遇到mBot机器人走不直和方向走反的情况,遇到这些情况怎么办?这很可能是电机工作不正常的原因。
一般我们提到的电机工作不正常,可能会有以下两种现象,下面针对不同问题现象给出解决方案。
现象1:
给mBot发送前进指令时,小车做出后退的动作。
解决方法:
多数情况是两个电机的接线插反了,在主板插口上将电机线对调即可。
现象2:
给mBot发送前进或者后退的指令时,小车走的是曲线而非直线。
解决方法:
1、可能轮子被 RJ25 线等物体卡住,检查两个轮子是否其中一个被螺丝拧得过紧,导致阻力变大,速度减慢。
2、可能轮胎安装没有到位,轮胎安装位置不正,会导致轮胎侧面接触地面,造成速度差导致转弯。
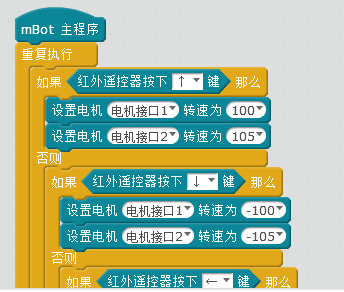
3、如排除第1、2步的原因,若小车依旧有轻微的不走直线,那是正常的。因为在电机行业里,每个直流电机速度都有速度差异,这个可以通过后期软件编程解决,具体操作方法如下:
在mBlock里面(以下程序基于mBlock3编写)对小车进行编程矫正速度差:在程序上给两个电机设置不同的转速,可以让小车走直线。如在给同样的速度值(100)的时候,观察哪个电机的速度比较慢,然后就加大那个走得慢的电机的值,如电机1(快)速度=100,电机2(慢)速度 = 105(如下图所示),然后将其上传至mBot,可以不断调节不同速度值,以达到两个电机同步的效果。