原标题:20分钟 Makeblock mBot 智能机器人硬件快速搭建指南
文:johnjacobs
经过之前的开箱简介,想必大家已经对MakeBlock mbot机器人套件有了一个初步的认识。看着包装盒里面那么多的零件,可能会有人嘀咕了,这个机器人到底容不容易组装呢?带着这个问题,你可以看一看这篇帖子,我会一步步地教你们安装这个mbot机器人套件。
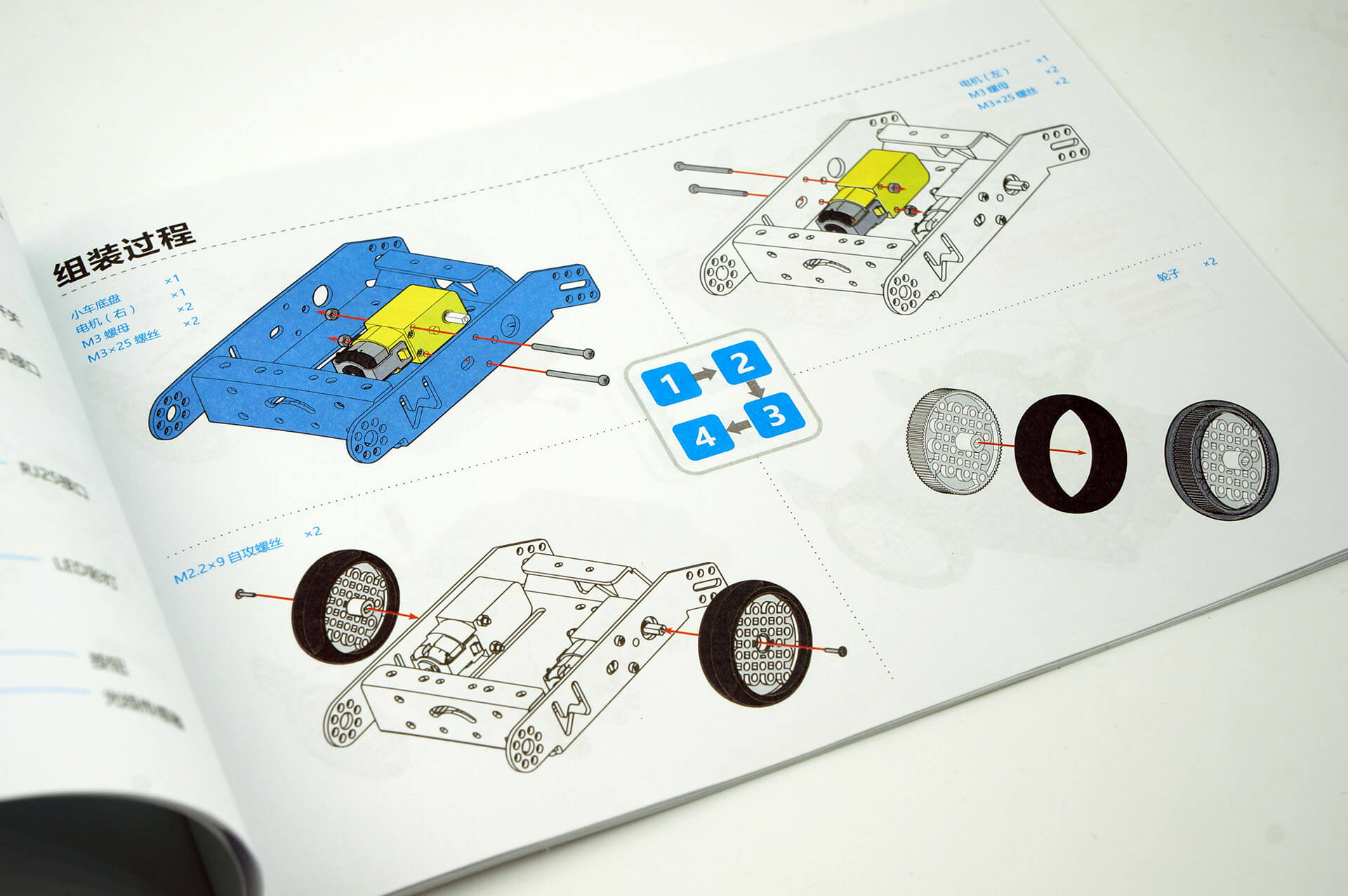
首先需要说明的是,mbot编程教育机器人套件提供了一本说明手册来为大家介绍安装方法,其介绍风格有点儿像乐高,很容易理解。而这篇帖子则是希望用实物,来为大家介绍安装时的一些步骤。
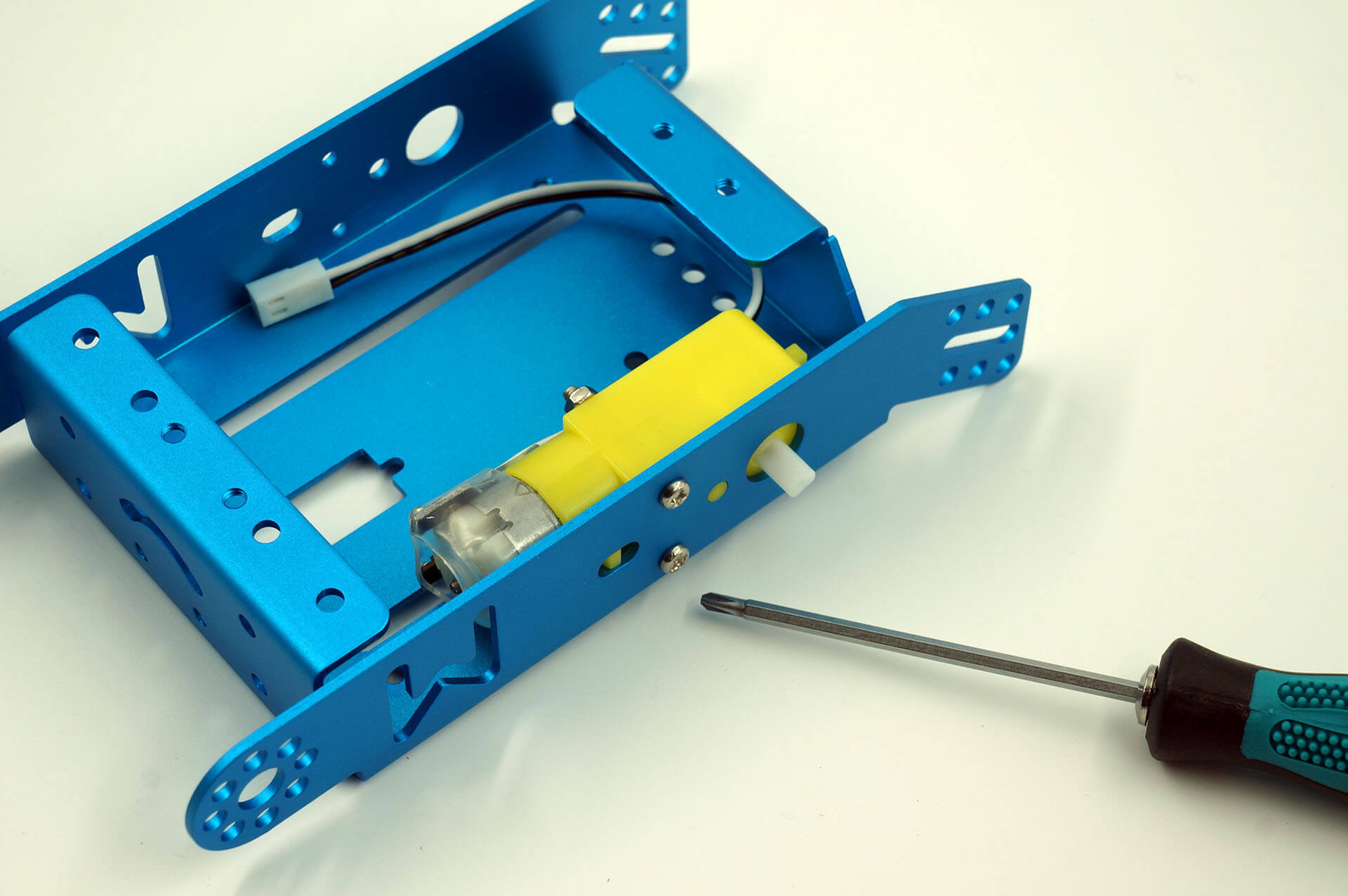
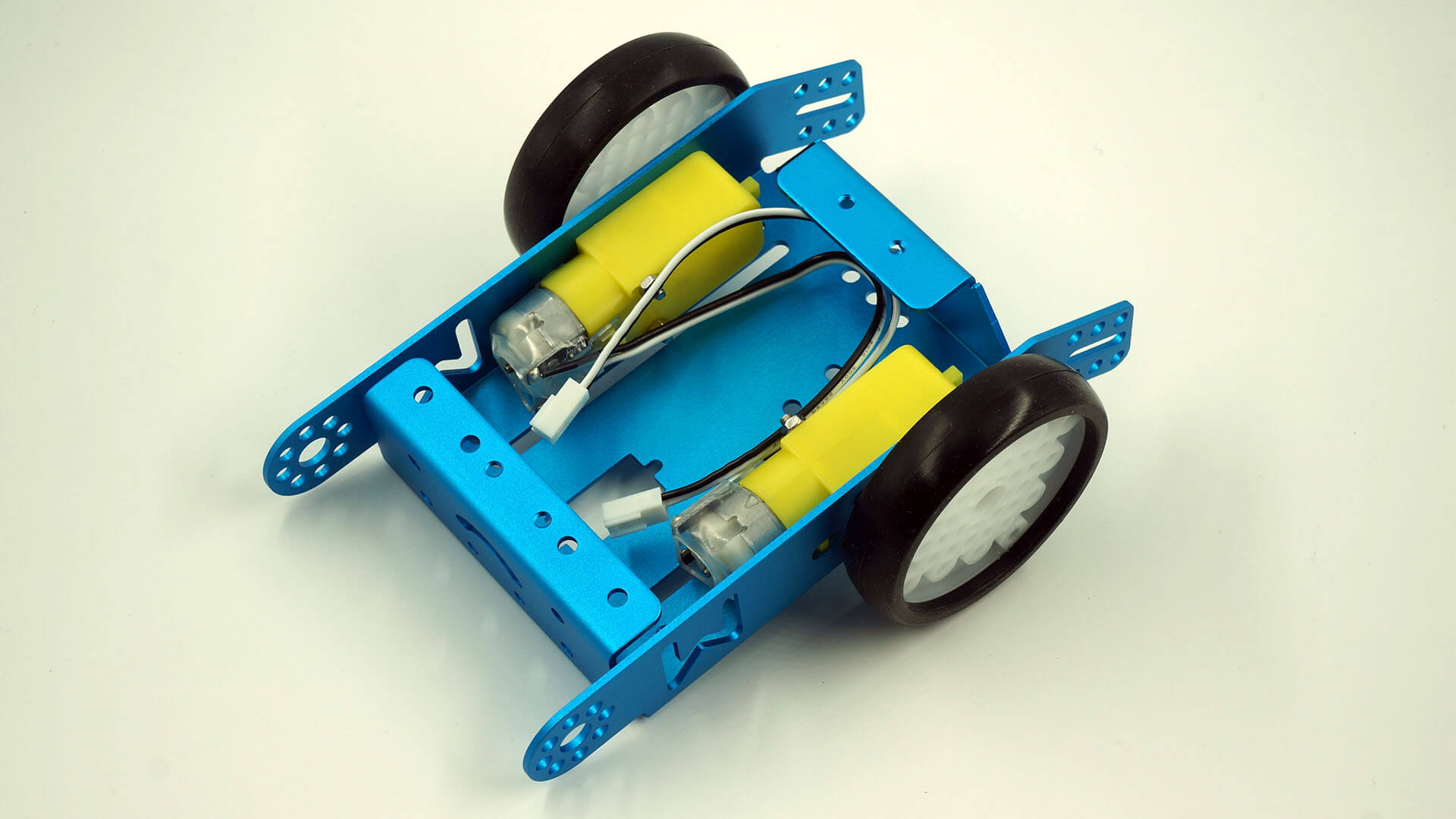
首先,我们先拿出蓝色的骨架和电机,从电机的安装开始
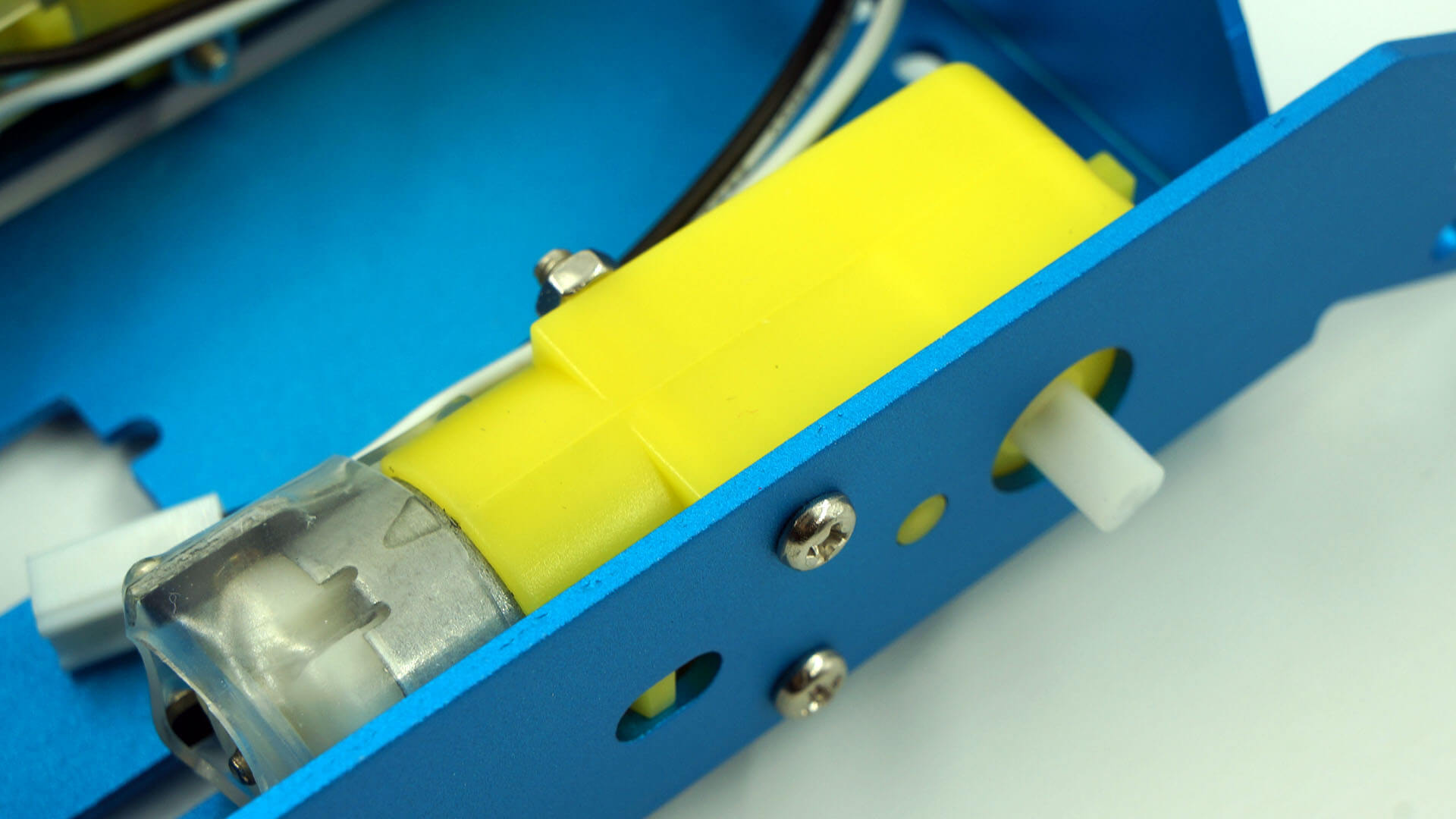
将电机的安装孔与骨架的安装孔对齐,并且将包装中的长螺丝穿过骨架和电机,另一端用螺母固定。

另一侧电机也是同样的方法,两个电机本身不分左右,所以直接安装即可。另外注意电机的外壳是塑料材质,所以螺母在拧紧的时候不要太用力,以免把外壳压坏。

接着,我们把车轮组合起来,实际上就是把橡胶车胎套在塑料轮毂上就行,车胎内侧有沟槽,可以直接把轮毂嵌在里面。
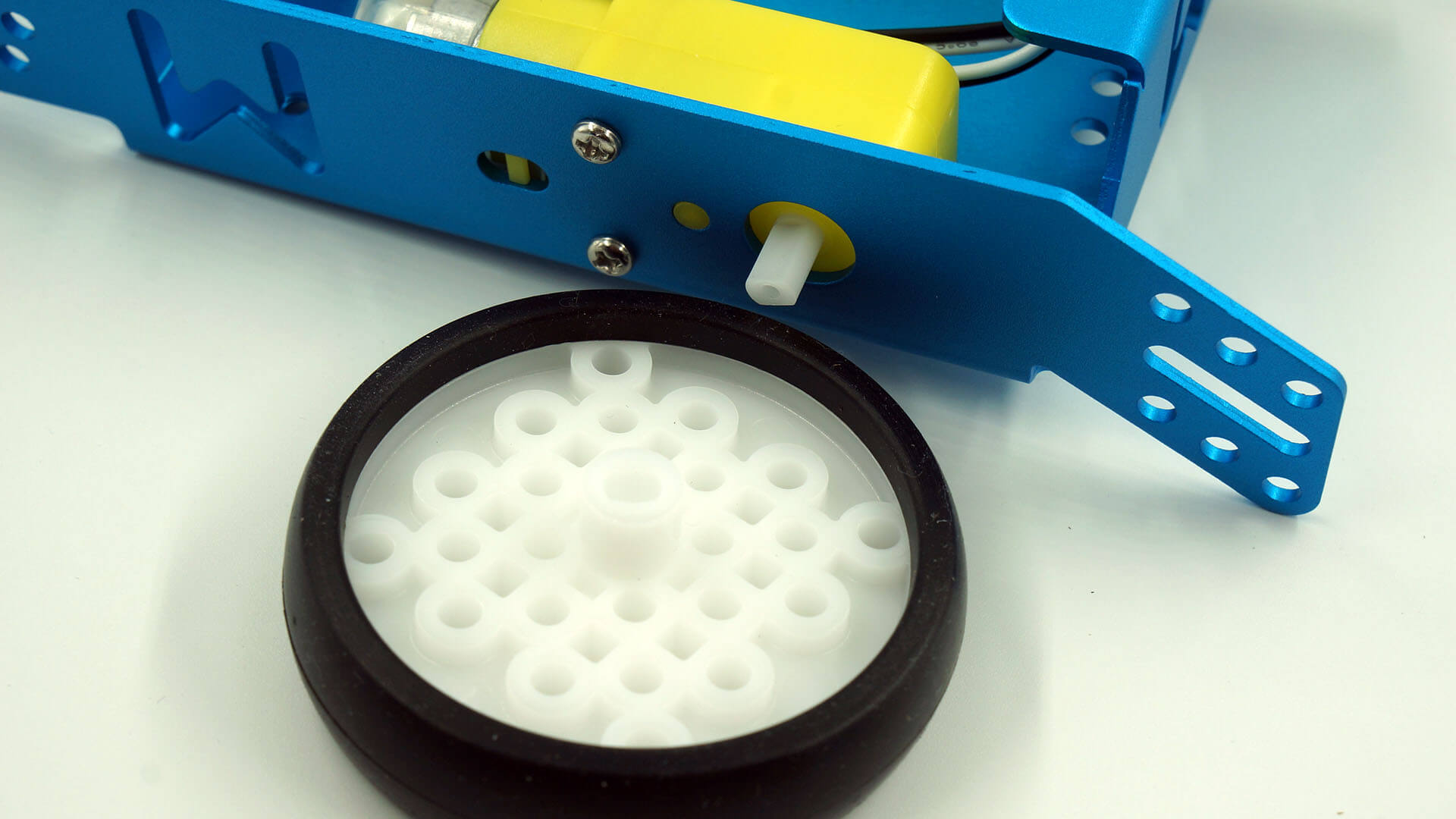
然后把车轮插在电机的轴上,车轴由于采用了椭圆形的设计,所以车轮安装上非常稳固。
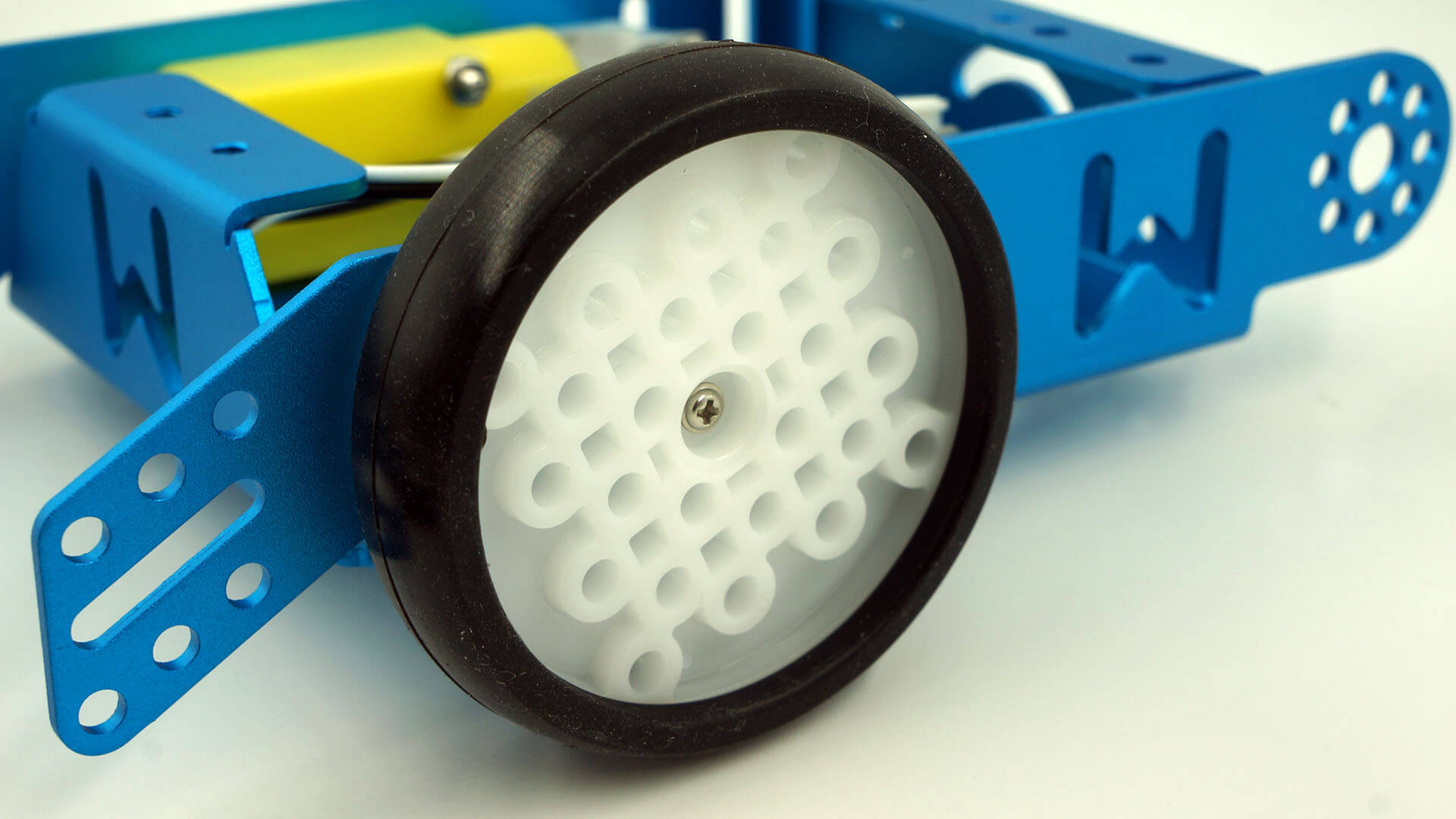
紧接着拿出自攻螺丝,直接将车轮固定住。自攻螺丝拧起来需要稍微用点力,拧的同时可以用手扶住车轮,以免车轮滚动。
车轮安装好后,我们就可以看到一个机器人的轮廓了。
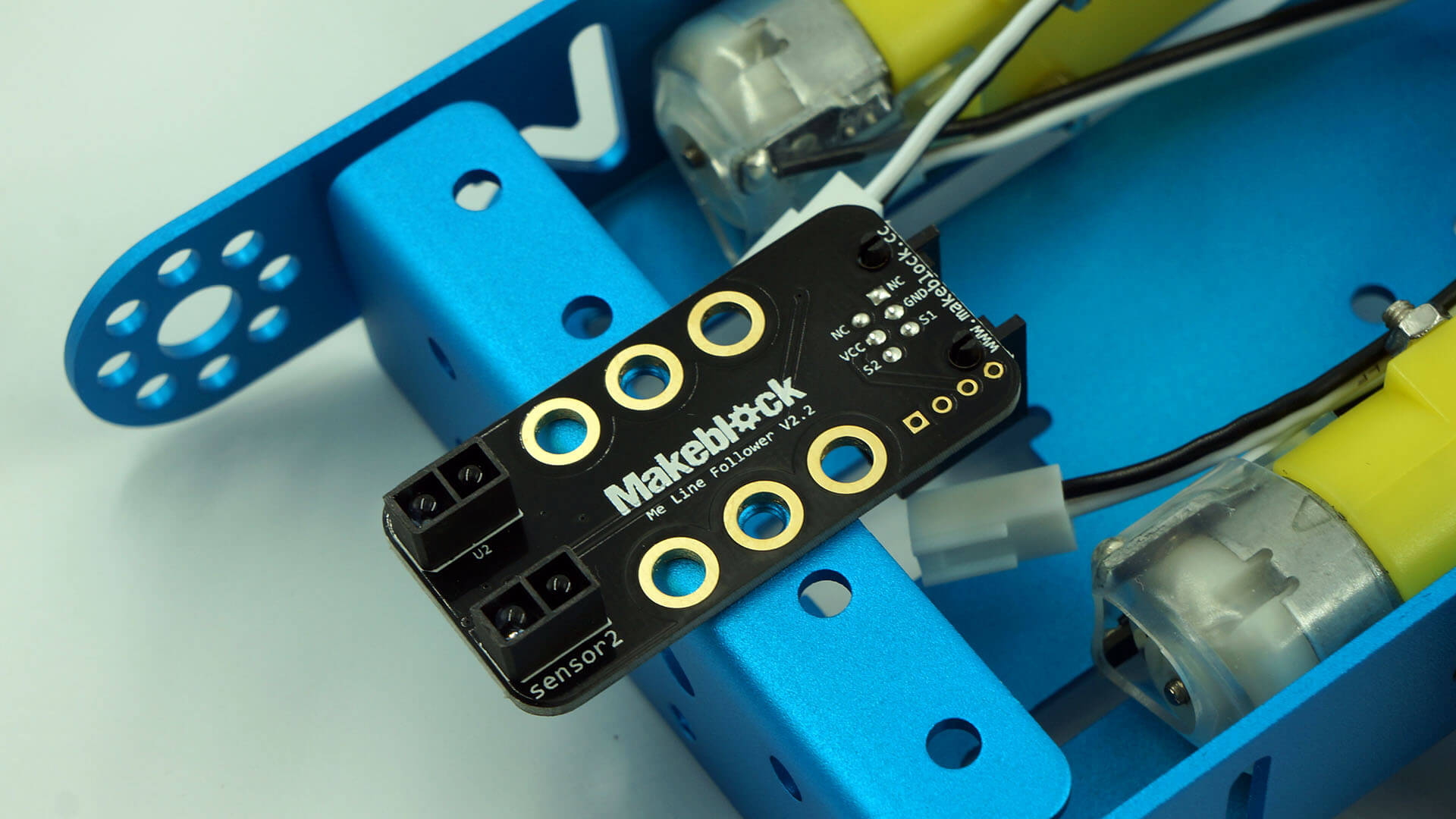
紧接着,我们来安装寻迹传感器。将传感器的安装孔与骨架的螺孔对齐。
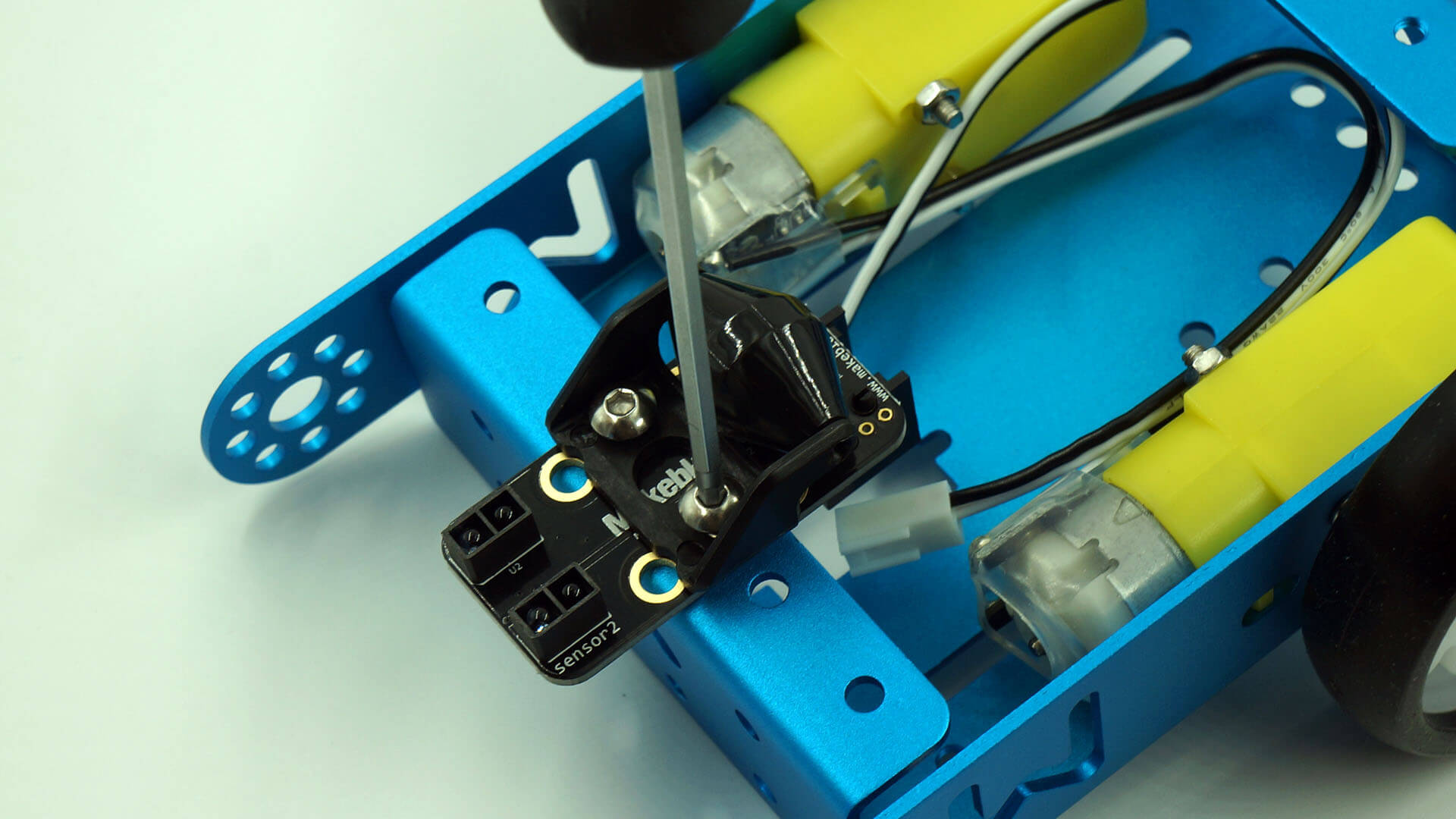
在传感器上面再加上一个辅助轮,并且用附带的内六角螺丝固定。附赠的螺丝刀和螺丝匹配度很好,拧起来很顺手。
安装好后,机器人就能够完全站立住了。
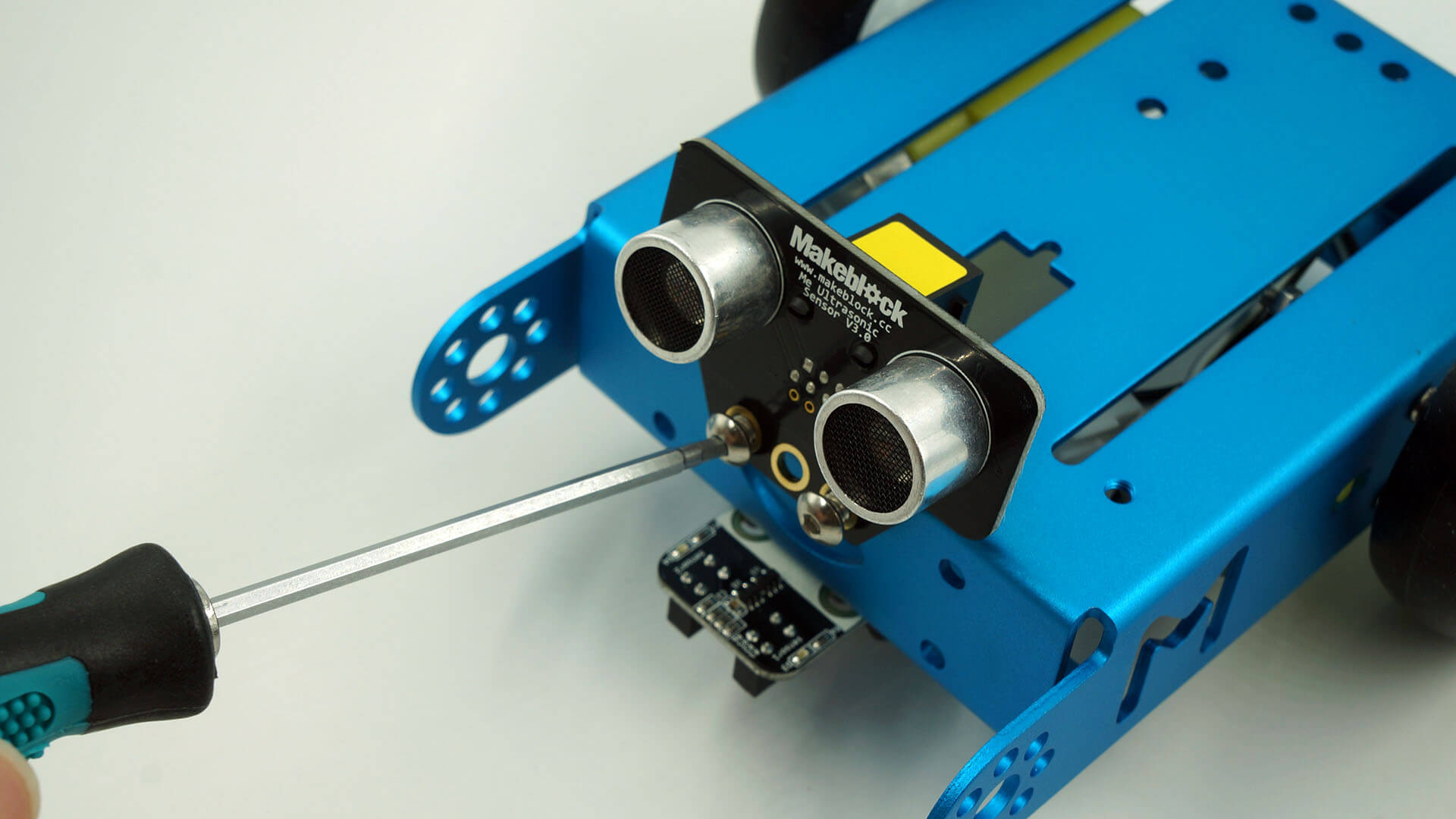
同样的方法,我们在车头部位安装超声波测距传感器。

传感器的两个大眼睛搭配上骨架上的开槽,看着还有点萌萌的~
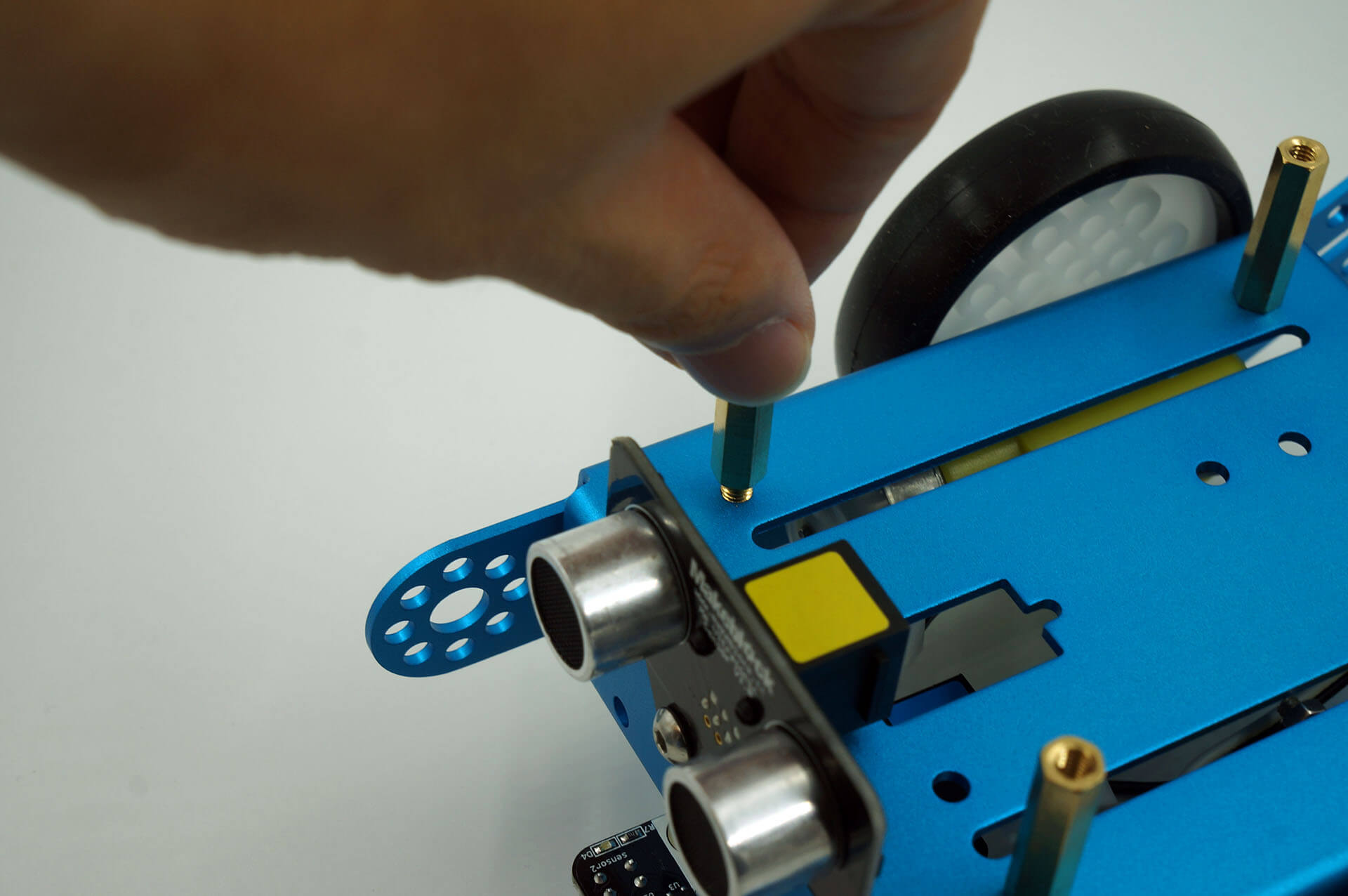
我们把四个铜柱徒手拧在骨架上。
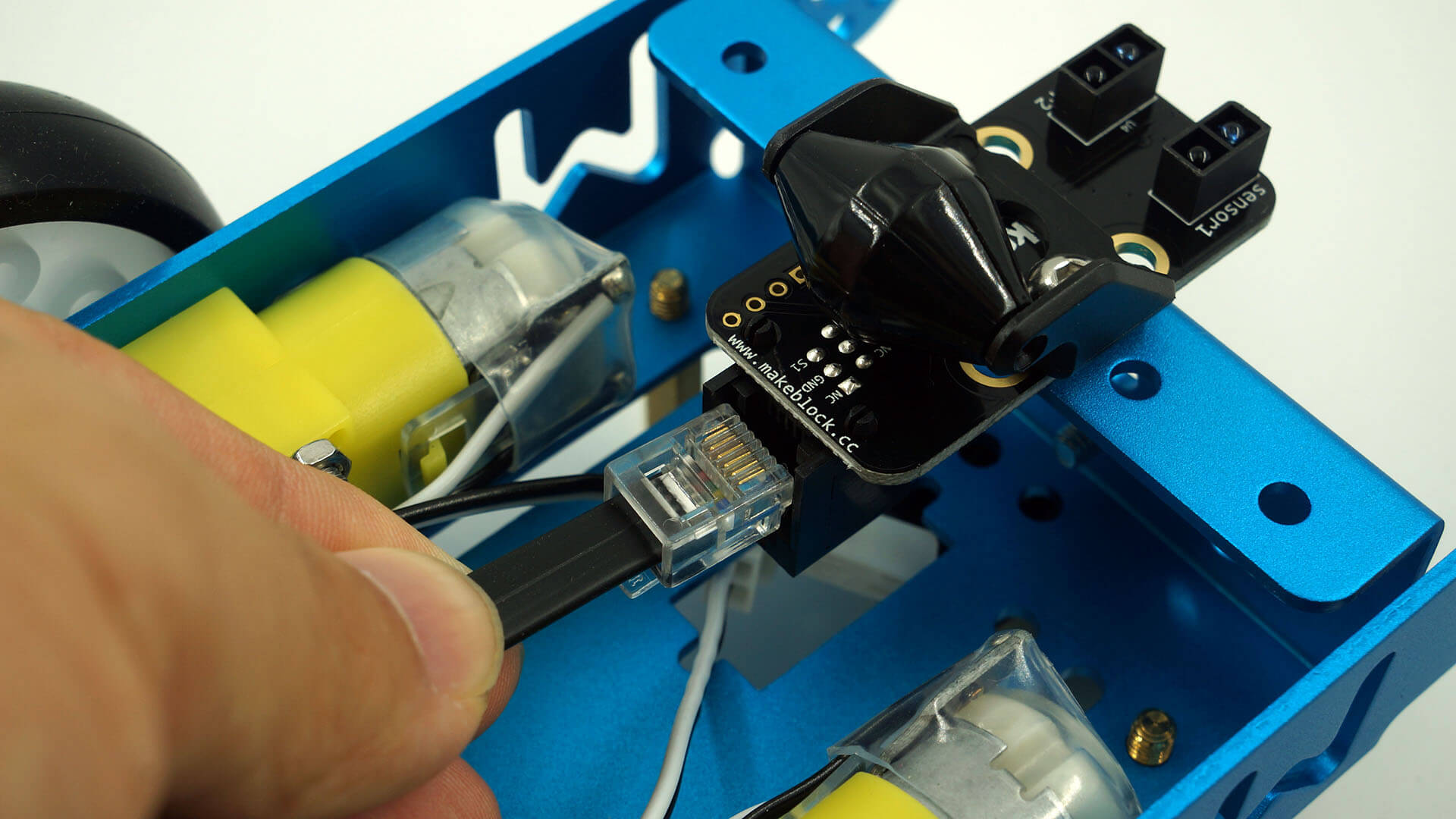
包装里有信号线,拿出来一段连接在两个传感器的端口上。
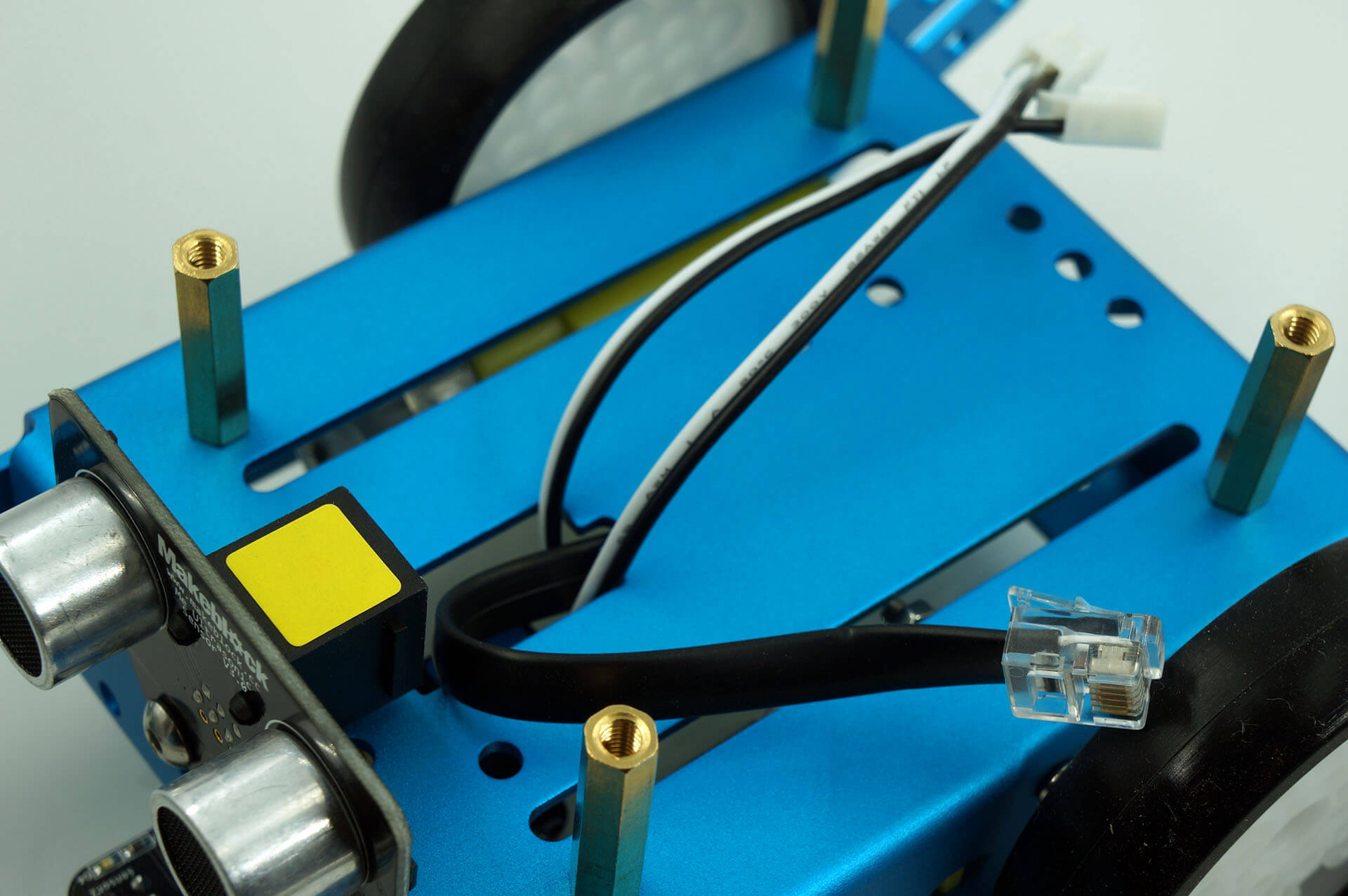
信号线的另一端暂时留空,和电机的供电线一起从骨架的中间开槽中顺出来。

弄好了机械部分,我们再来弄控制器部分。这里我们需要手工打开主控的外壳,将蓝牙模块安装进去。外壳采用卡扣的方式固定,在卡扣部门轻轻一捏上盖就打开了。

打开的控制盒电路全貌。
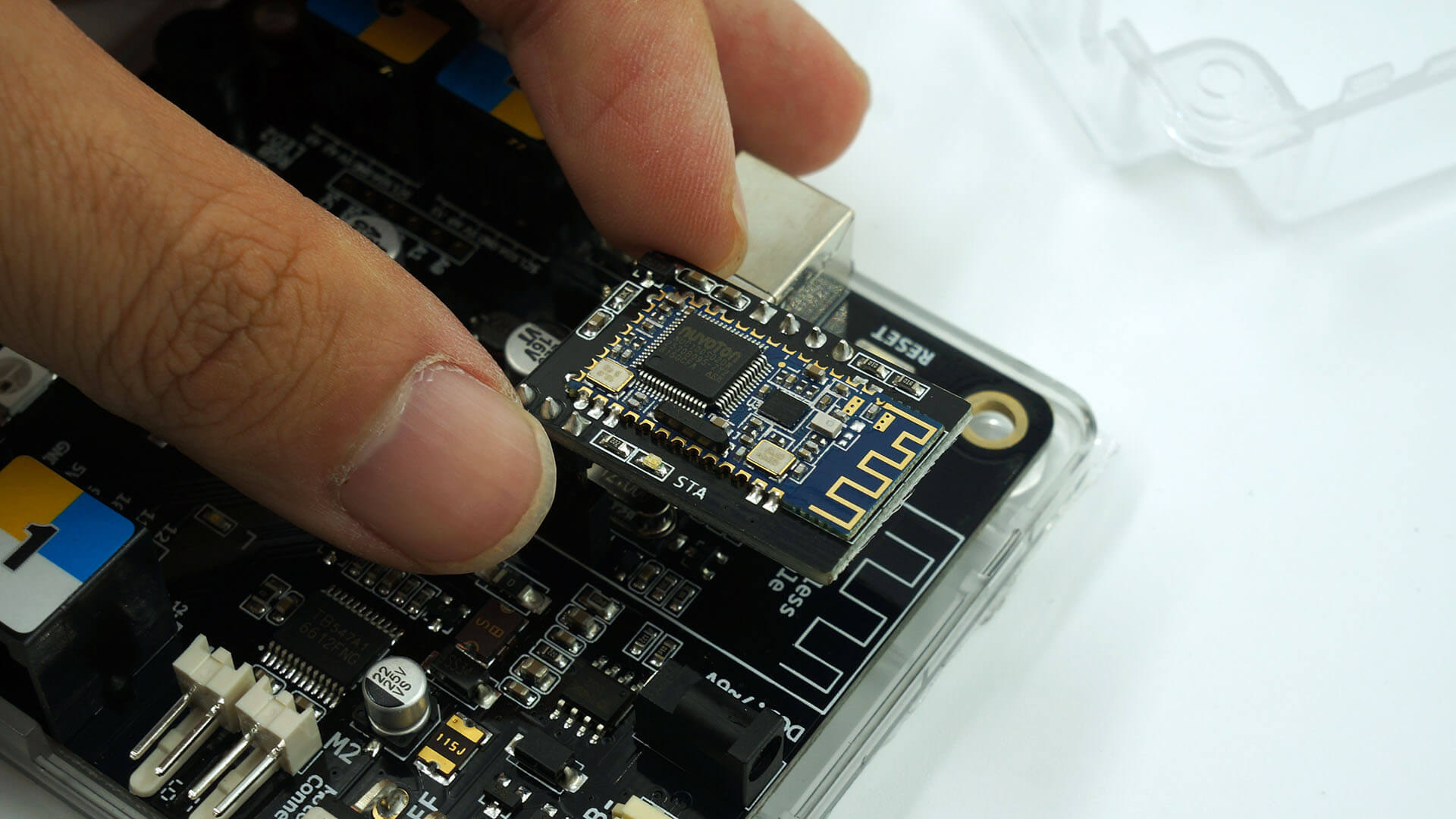
蓝牙模块作为子板,直接安装在主电路上。非常简单。不过安装前最好摸一下暖气啥的放一下电,以免静电损伤电路。

再扣回外壳,安装完毕!
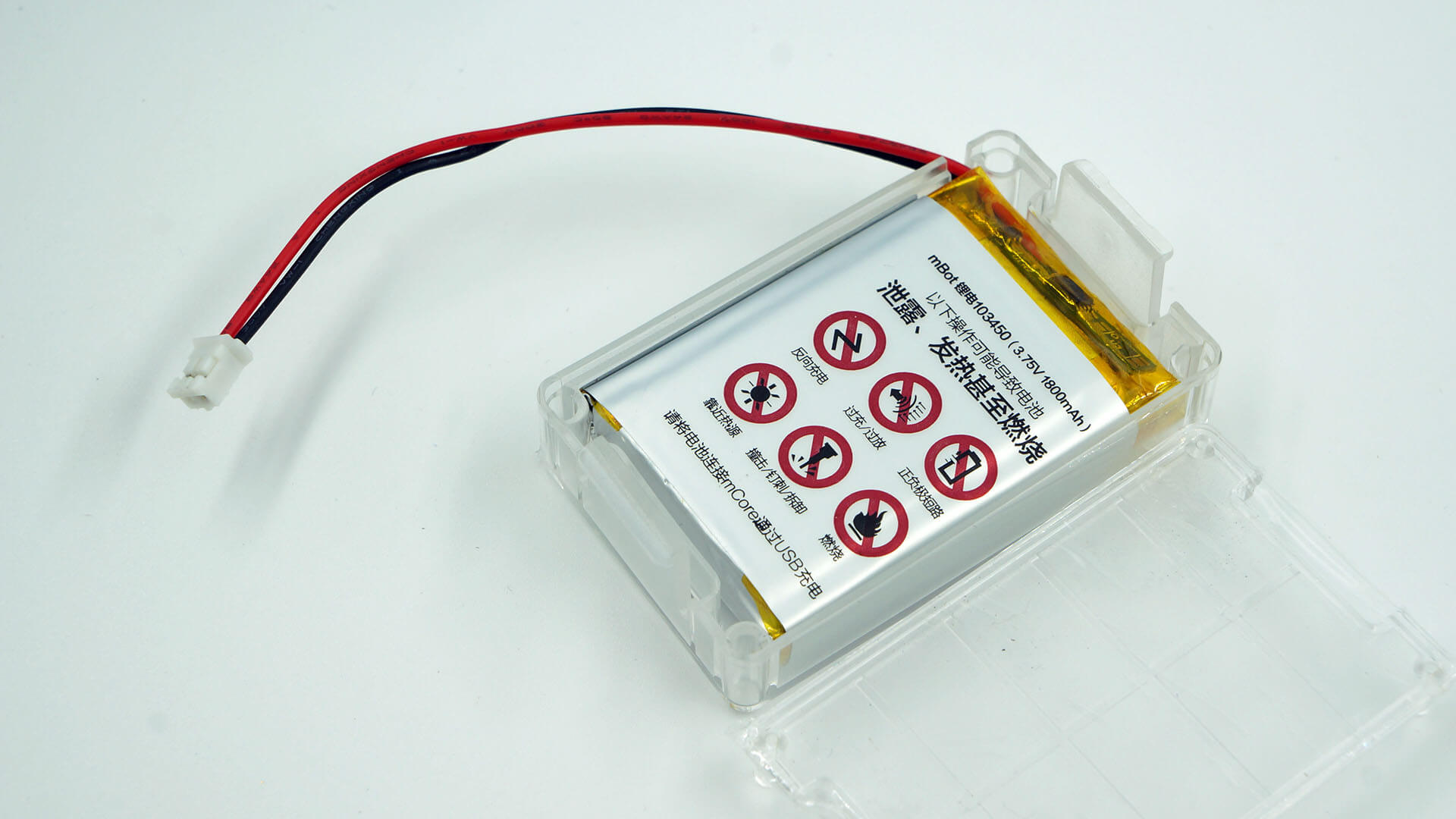
锂电池直接放到透明电池盒里,电池盒一侧有个槽直接把电源线露出来。
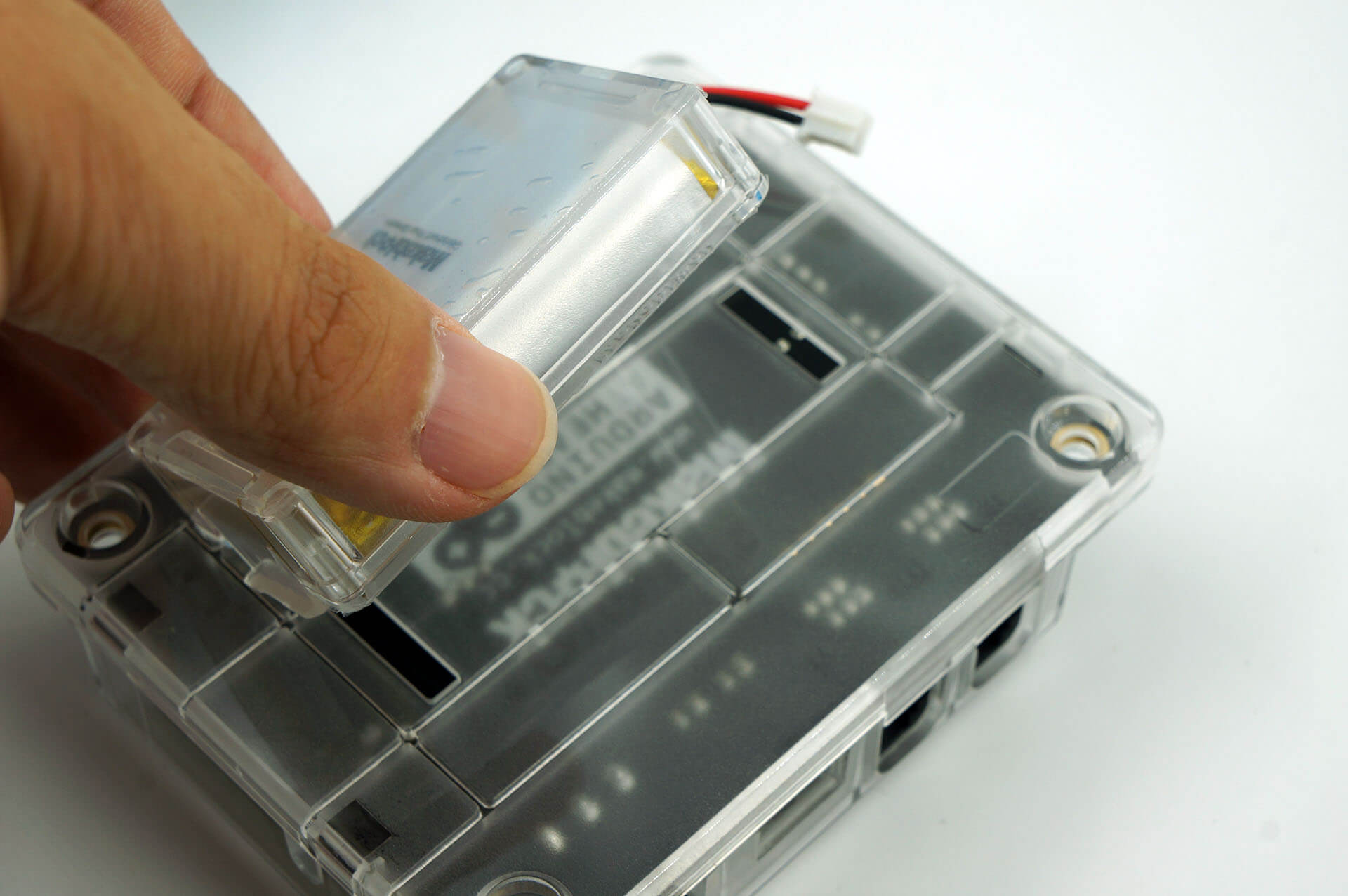
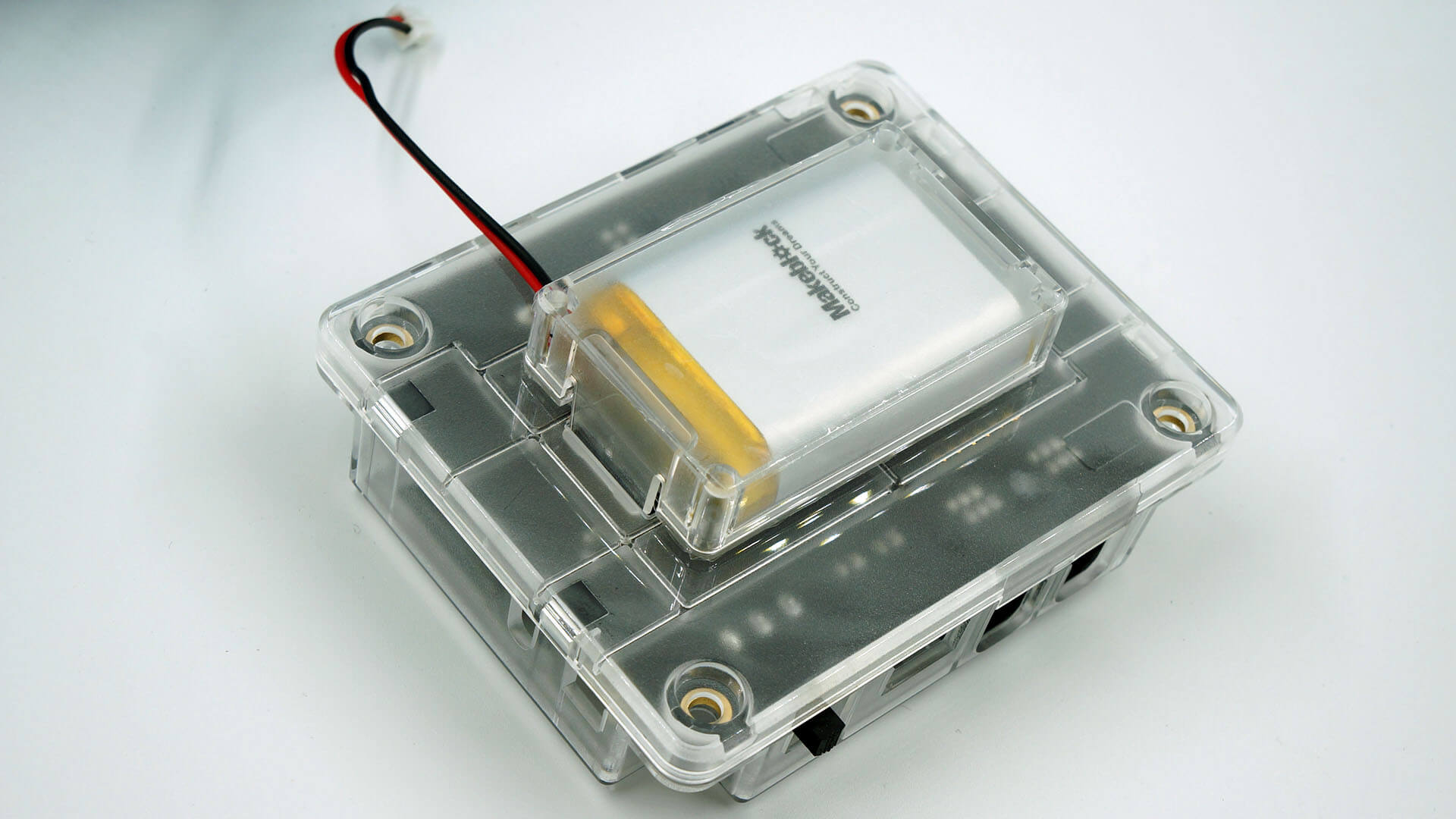
电池盒有卡扣,可以直接扣在控制盒的背面。
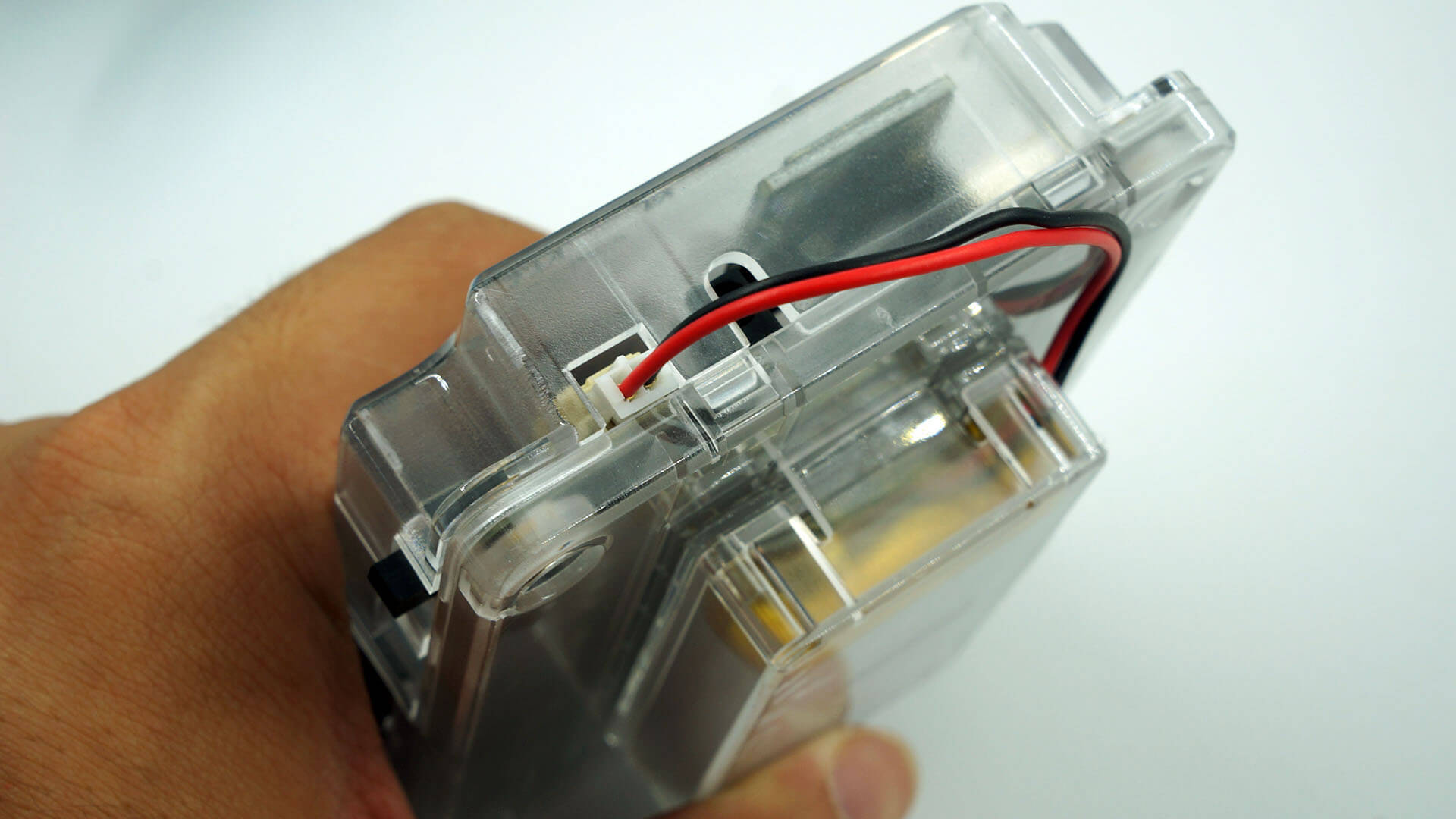
然后将2pin的供电线与控制盒连接。
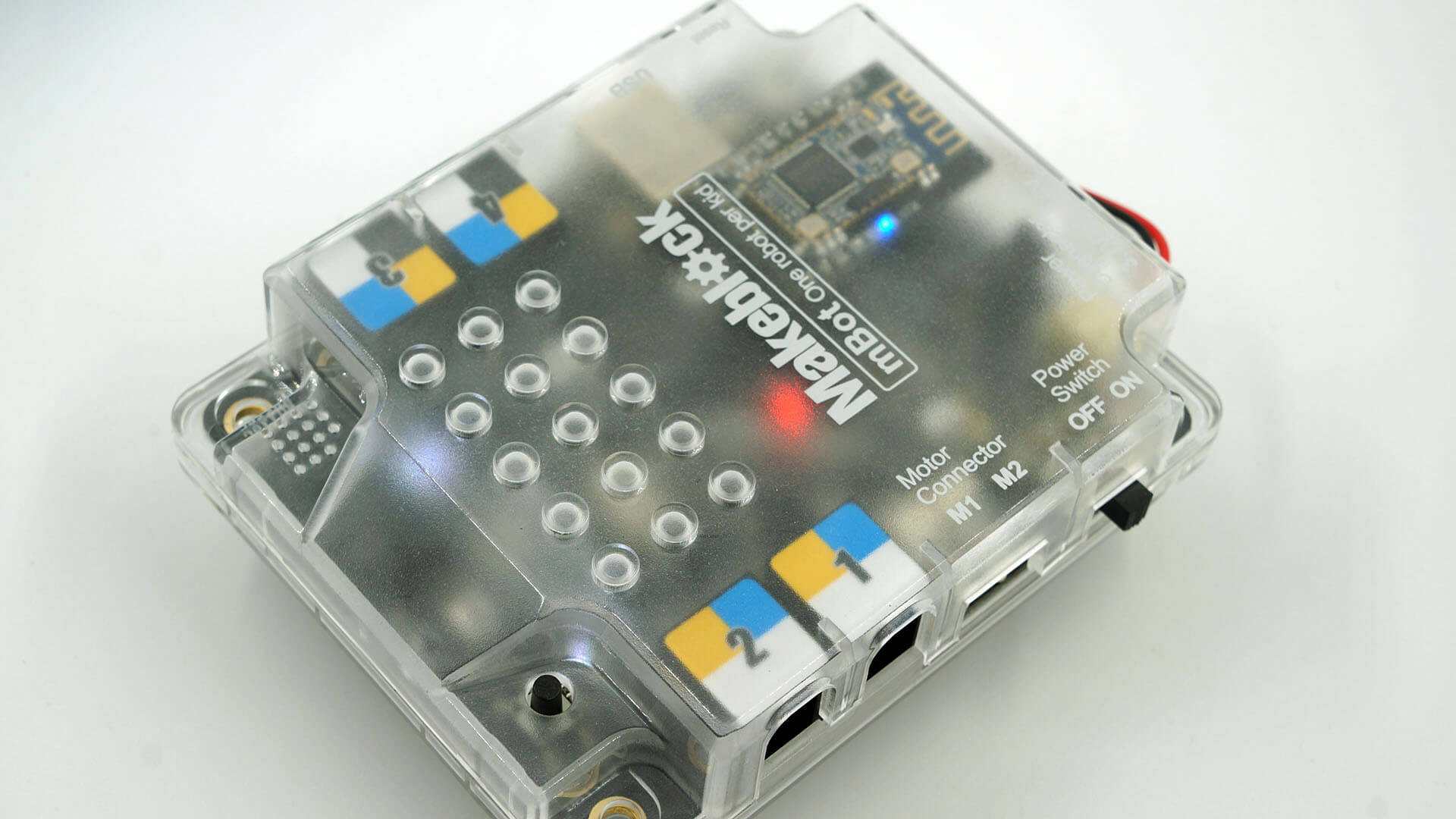
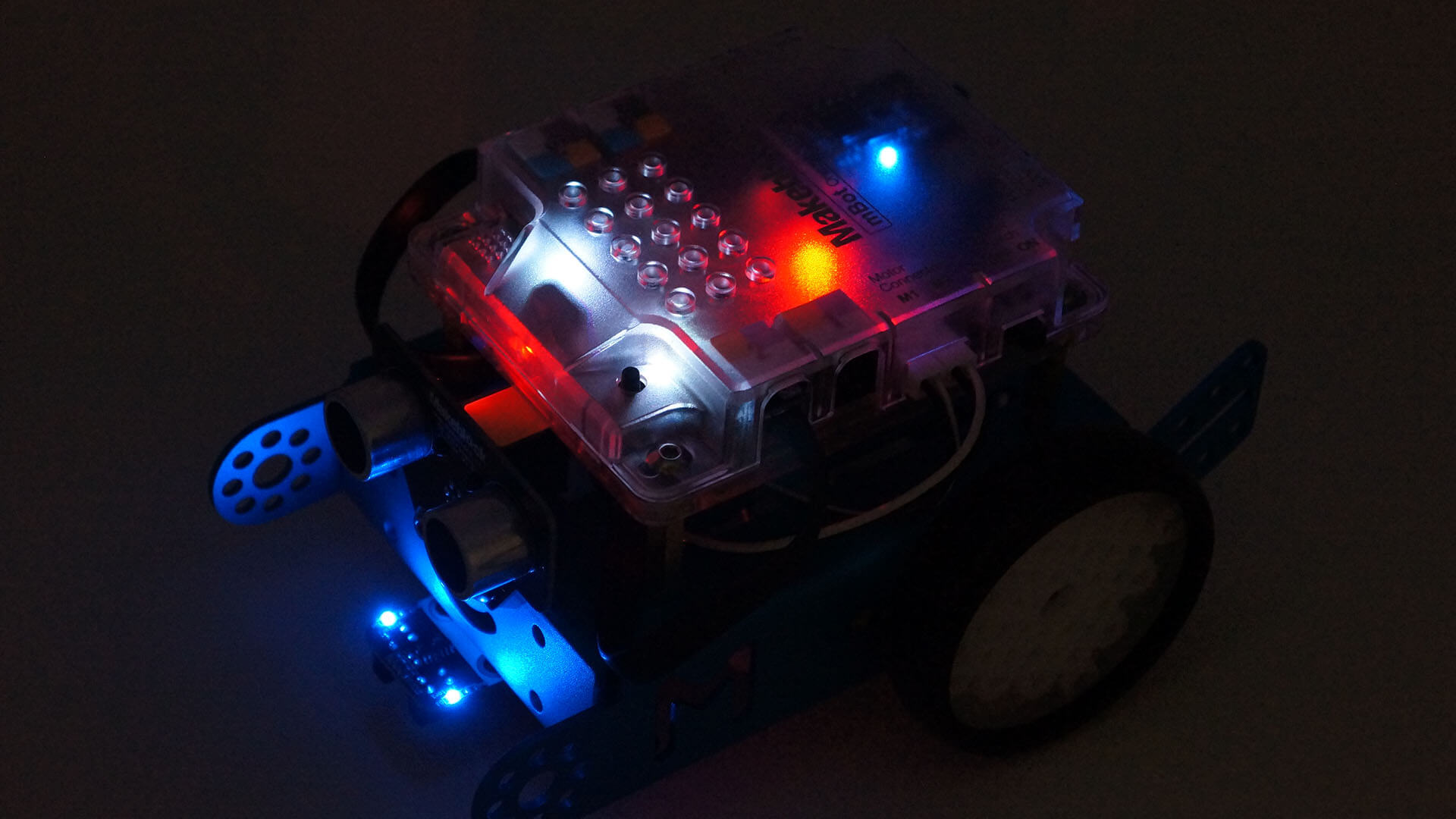
连接好后,可以打开开关试一下。如果没有什么问题的话,控制盒里面的指示灯应该会亮起,并且有提示音。
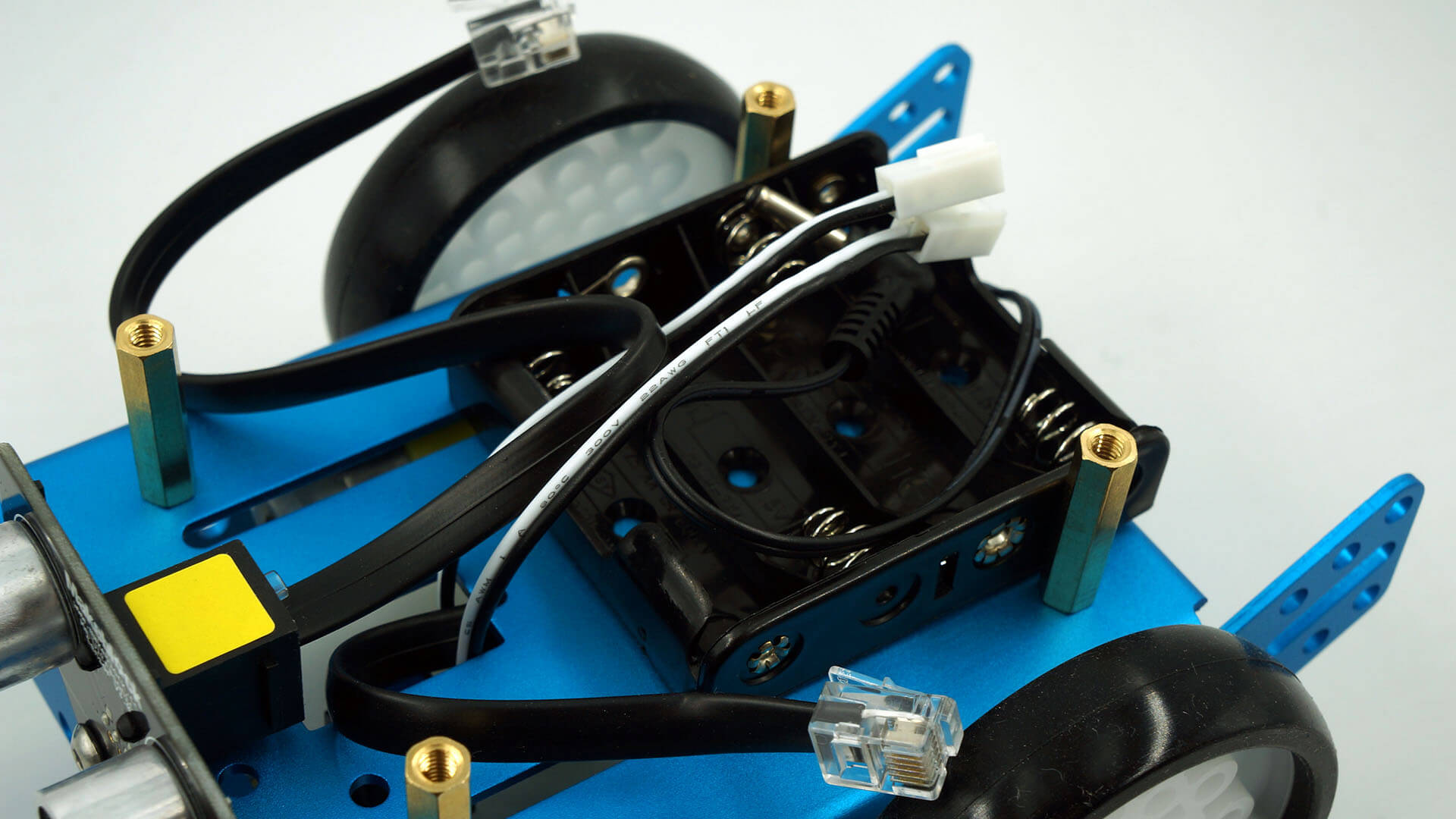
当然,如果你不喜欢锂电池的供电方式,还可以选择使用5号电池盒。这个安装 更简单,只需要将电池盒上的螺孔和骨架对齐,用螺丝固定就行了。电池盒的电源线也可以直接和控制盒连接。
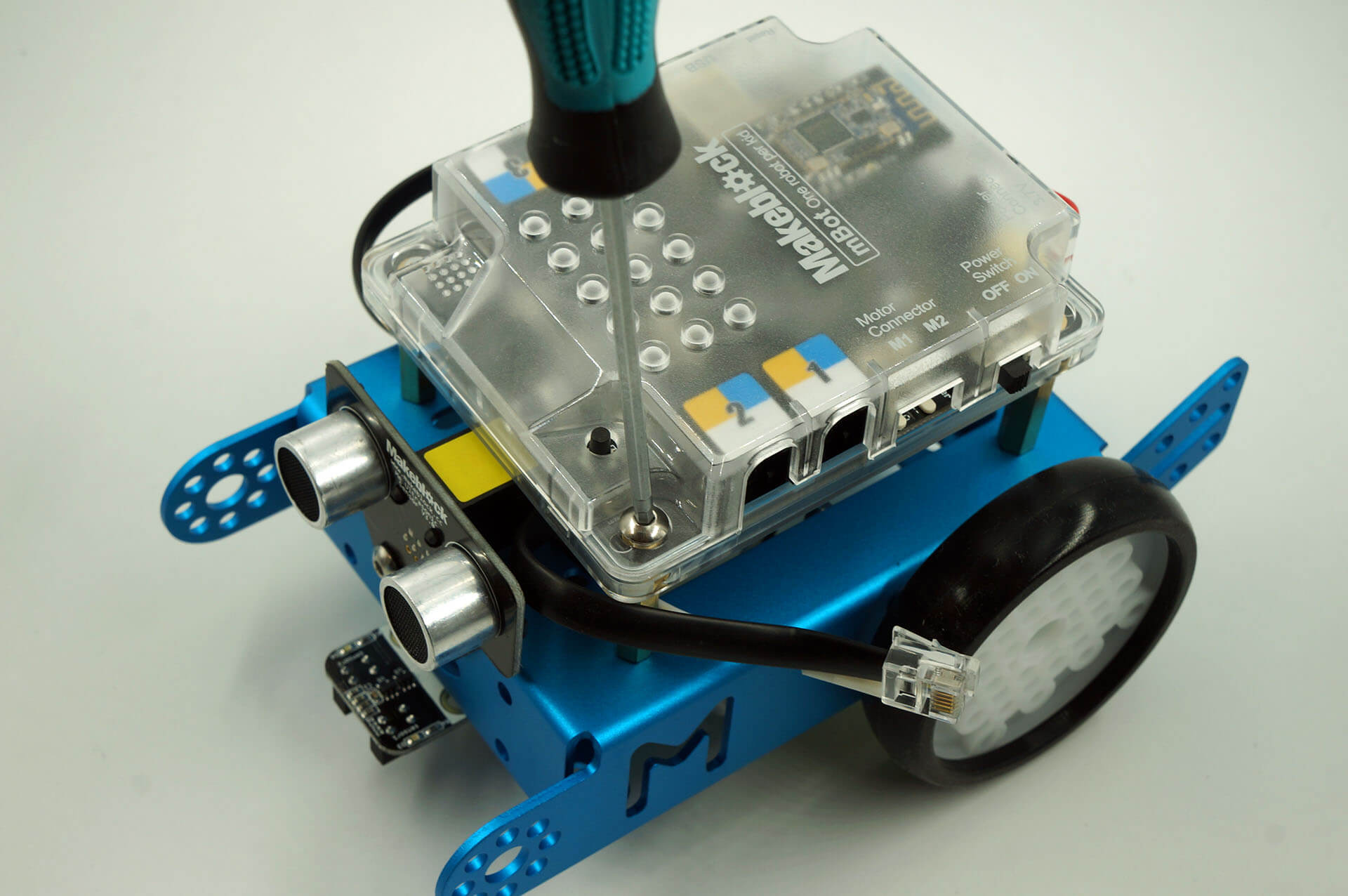
确认电池盒安装好后,我们直接将控制盒的螺丝孔与骨架上的铜柱对齐。用螺丝固定即可。

最后,我们需要把刚才整理好的电机供电线与控制盒连接。插头都有防呆设计,所以不用担心插反。
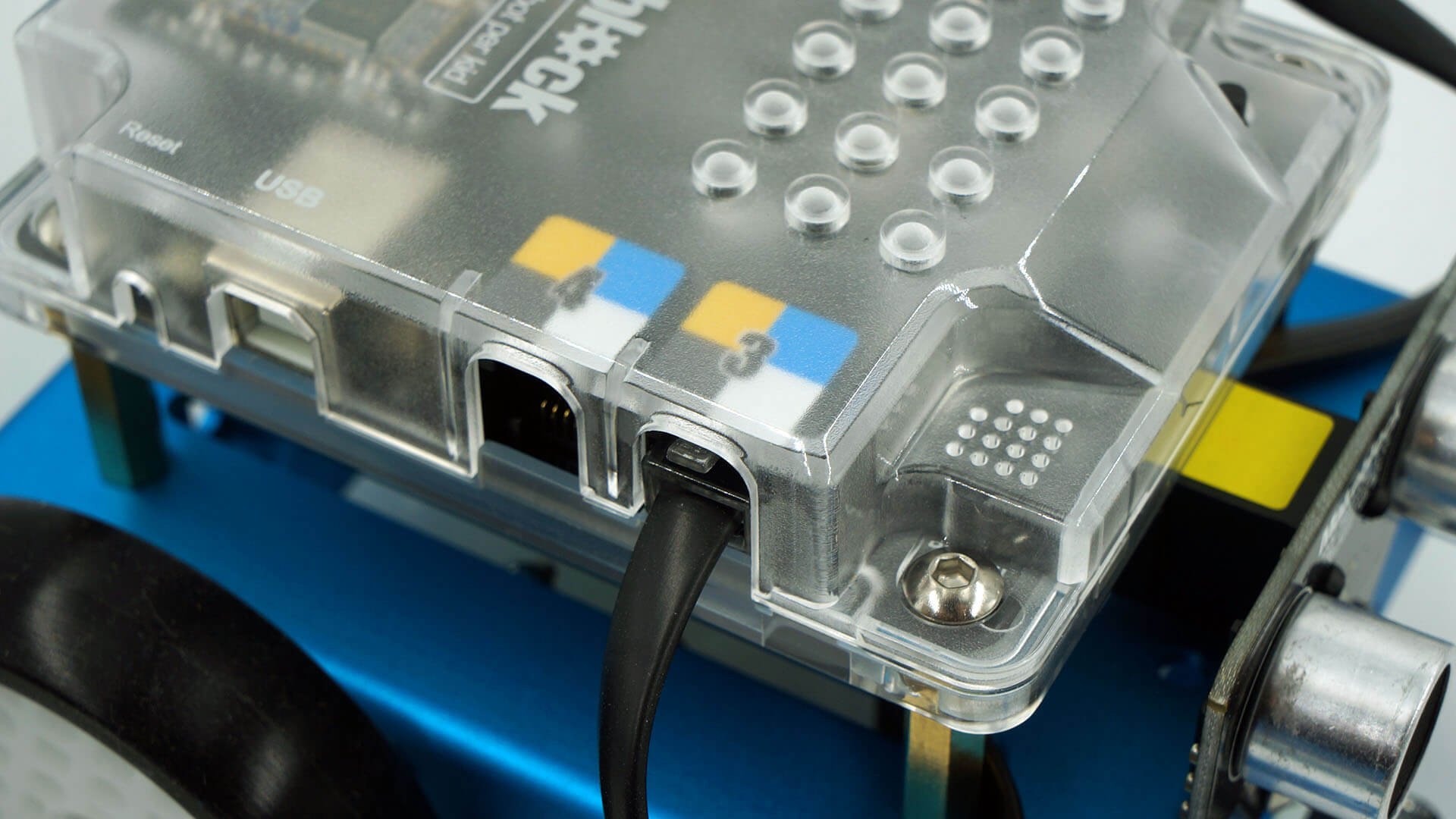
传感器的信号线也与控制盒连接。控制盒上的端口的编号决定了今后编程时调用模块式需要使用的端口编号。

这样,mbot机器人套件就算是安装完成了!!!
组装完成后,我们就可以打开电源,测试一下机器的工作状态是否正常,为了方便测试,官方已经内置了两种机器人不同的工作模式,分别是寻迹模式以及避障模式。我们可以通过控制盒上面的按钮来进行切换。
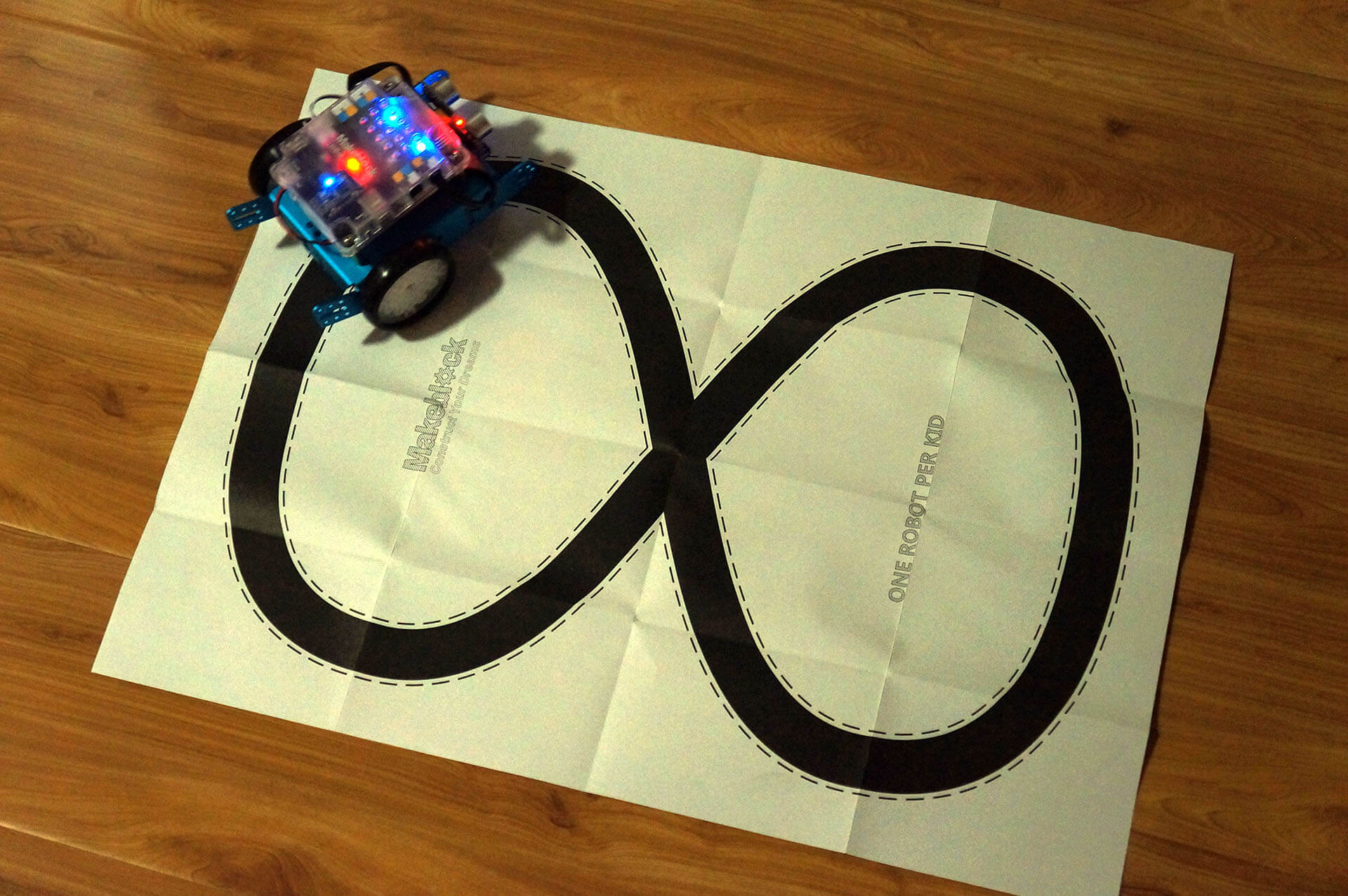
包装里面有一张”8″字形的图,这样图就是用来测试机器人的寻迹功能的,下面就用这张图来试一试吧。
经试验,mbot机器人的工作状态非常出色。能够自行循着轨迹前进。这样,mbot套件最初的硬件搭建工作就算是告一段落。后续我还会给大家介绍该套件软件部分的内容。