文:邱老师
上次课程我们学习了用速度乘以时间计算程小奔移动距离的方法。那么,它能否测量还没有走过的路程距离呢?答案是可以的。
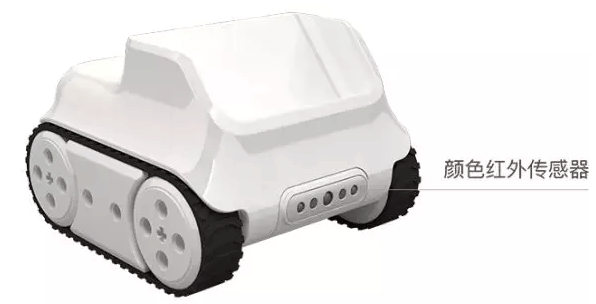
程小奔编程机器人集合了多种传感器,今天我们要使用程小奔机器人的红外测距传感器,它位于小奔前方的颜色红外传感器组之中。传感器组包括有红外传感器、颜色传感器、灰度传感器、环境光强度传感器、反射光强度传感器、红外反射光强度传感器。
我们之前的课程已经学习了它的颜色识别传感器,你还记得吗?
红外测距传感器包含发射器和接收器,发射器能够主动发出红外线。红外线遇到物体时发生反射,接收器接收到反射信号后可以根据发射与接收的时间差计算出距离。

程小奔机器人的颜色红外传感器组是多传感器组合成一排,使用者是可以自主上下拨动的,例如将传感器组朝下拨动,就可以让颜色传感器感测地面颜色。而拨动传感器组向前时,就可以使用红外测距传感器测距了。 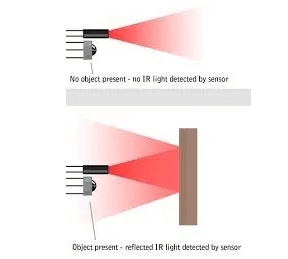
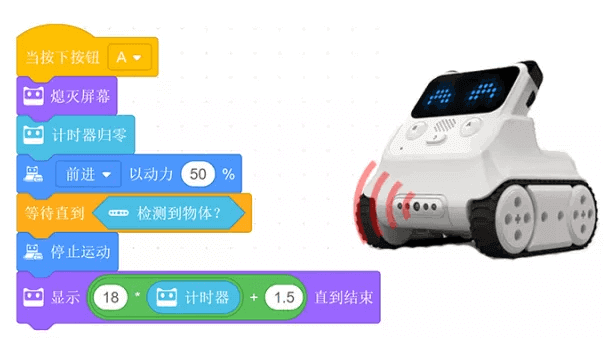
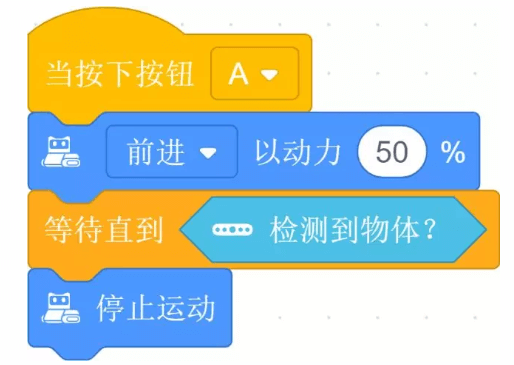
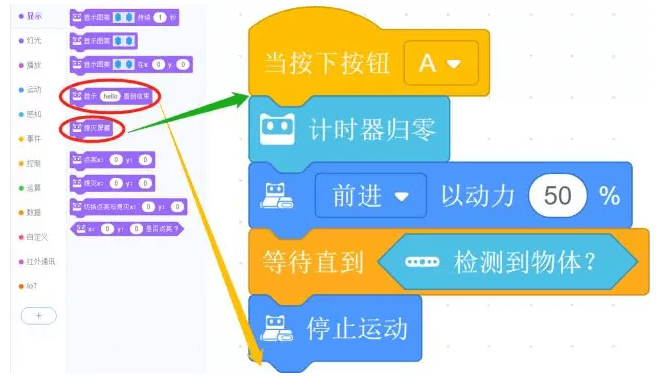
试看程小奔按下按钮后是不是直到接近物体之后就会停止,在这边需要注意的是因为传感器是有一个高度的,识别的物体需要比这个高度再高一些,尽量是一个平面,例如一面墙。




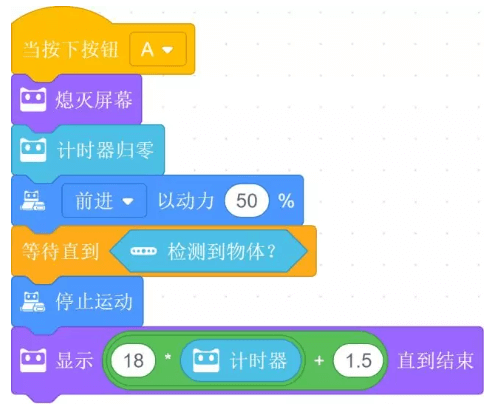
我们可以看到,程小奔测量出19.5厘米的距离。
因为计时器的单位为秒,测量只是一个约略值,不适合测量太小的距离,大家可以发挥自己的想象力,拿程小奔来测量不同的距离吧
程小奔是一款普及型编程机器人,如果你喜欢就把它带回家吧!
点击 程小奔 了解更多!