文:kevin
在使用巡线模块时,如果mBot机器人上已有巡线程序,小车还是无法完成巡线任务,可通过以下方式,对巡线模块进行检查:
首先需要提到的一点是, 建议将巡线地图放在光线稍弱一些的地方测试,光线太强的地方巡线效果可能不太理想。
检查模块本身的好坏
这里有个简单的方法,可以来验证下巡线模块正常工作与否:
将巡线模块插上主板接口,给mBot机器人上电后,将其靠近白纸或者白色桌面,观察下巡线模块上面的两颗蓝色LED灯的亮灭情况(正常应为靠近桌面或白纸两灯均亮,远离桌面两灯均灭):
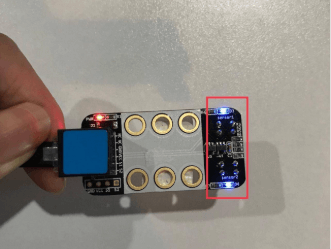
若未出现上述现象,可为巡线模块更换RJ25线或插到主板的其他接口,以此验证是否是主板供电问题。
检查接线问题
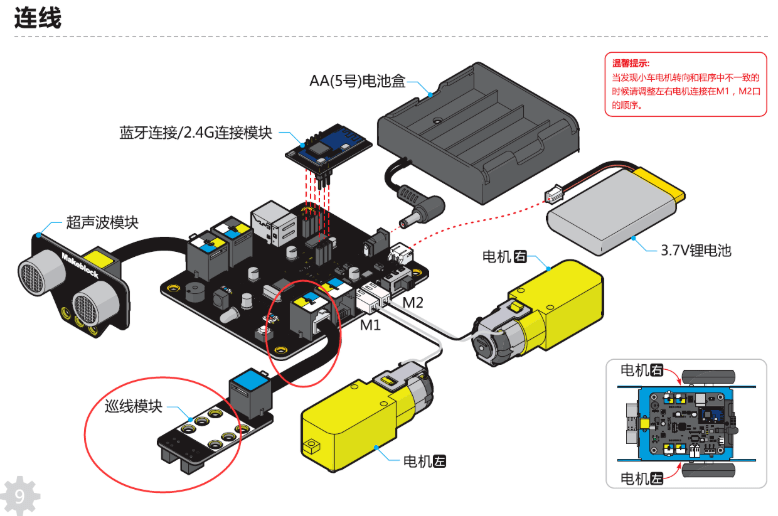
在使用mBot机器人的出厂巡线模式时,巡线模块应该接在主板的2号端口,否则会出现巡线不成功的现象。
如果出厂程序的巡线模式还是无法正常巡线,可尝试「恢复出厂程序」看下。
具体可参考如何「mbot机器人如何恢复出厂程序」
如果是自己编写的巡线程序,检查下巡线模块的接线口是否与程序中的一致。
通过mBlock软件读取返回值
通过mBlock软件(点击下载)来读取巡线模块返回的数据,一共分为两步:
第一步,也是必备的步骤——「安装固件」
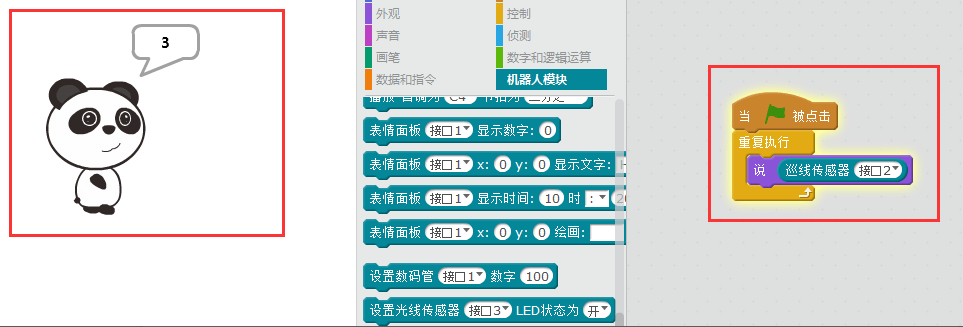
待第一步成功完成后,编写并点击绿旗运行如下程序,从而获得巡线模块的在不同状态下的返回值,正常模块在不同情况下(靠近白纸和远离白纸)会读得 0、1、2、3 四种数值。
以上就是mbot机器人巡线模式工作不正常怎么办?的全部内容,如果你尝试后仍然有问题,请联系makeblock售后客服。